In my last post, I introduced my painbox project and talked about the prototype I’d assembled so far. The basic functionality was there, but the performance was subpar. The device itself was also a giant mess, making it hard to iterate on. Time to make some improvements.
New parts
I decided to try to improve performance by upgrading the underperforming components. The most important performance aspect is the “cold” side temperature – you’ll recall from the last post that it never really got that cold at all. There are two reasons for the poor performance: the TEC wasn’t pumping much heat, and the passive heatsink on the hot side of the TEC couldn’t bring it close enough to ambient. Luckily, both of these problems were easily solved with a little money. I found a much higher wattage TEC and a CPU cooling heatpipe/heatsink/fan combo to go with it. Specifically, the heatsink has a dissipation rating that matches that of the TEC, which should hopefully allow ideal performance.

Cleaning up the project board
In the process of switching out the TEC and heatsink, I decided to redo all the plumbing and component organization as well. First off, I wanted to install smaller reservoirs to drop the volume, thinking this would improve time to target temperature. I swapped out the old reservoirs made with PVC straight tees for pre-threaded PVC corner tees. I’d estimate this drops the volume of water in the reservoir by about 50%, and it uses fewer pieces and less space to boot.
Next, I drilled holes to mount the “hot” heat exchanger to the project board. Nothing too fancy here, just four holes and some zip ties to keep the water block, TEC, and heatsink in place. At the same time, I mounted the “cold” TEC and the new giant heatsink to the project board with some long #4-40 screws.
Finally, I redid all the plumbing. The vinyl tubing I’d used is much stiffer than expected, making tight bends and precise part positioning difficult. To replace it, I used pieces of 3/8″ copper tubing bent with my tube bender and joined to other parts with short lengths of vinyl tubing as couplers. The result is much, much cleaner and more compact. I also moved the pumps to be directly in line with the inputs to the radiator.
Here’s how it looks after all the work:
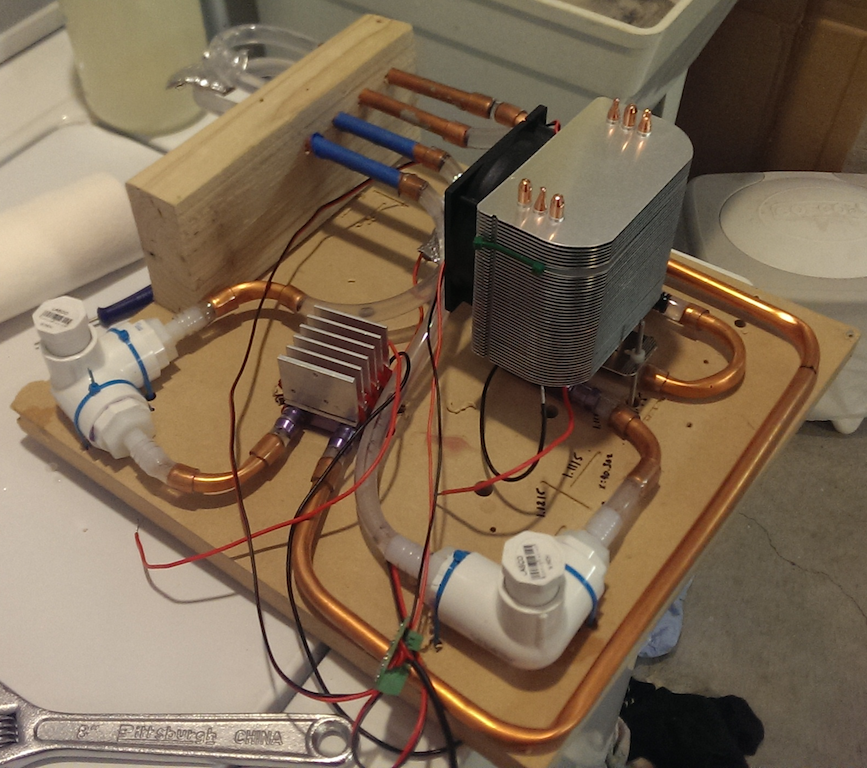
The plumbing is very neat, though the wiring is still a giant mess. I’m going to have to implement a good strategy there soon.
Performance
I could hardly wait to try it out again after hooking up that giant heatsink. I repeated my earlier setup of thermistors taped down to radiator pipes with pipe insulation, then turned it on and monitored results. Here’s what I got:

Power was switched off at 20 minutes, though monitoring continued to as a way to gauge how quickly temps went back to equilibrium.
Much better! We can now see that the cold side actually does get cold: down to about 16C after 10 minutes. I let it run for a while and then gave the radiator a touch. I found that the hot side still felt a tad too hot, making it impossible to really judge if it was “working”. So then I turned it on again and watched the temperature readout until it was at a desirable hot temp, and quickly gave it another try. It definitely felt hotter than it actually was! It’s very encouraging that the effect can be felt when the temps are in the right spot, even if that’s only briefly. Without closed loop temp control, the temps will never be where they’re supposed to be, so that’s definitely the next item on my todo list.
Temperature sensors
Another issue is temperature sensor accuracy. Right now, I’m relying on spherical thermistors pressed against cylindrical copper pipes and held in place with adhesive pipe insulation. Contact between the sensor and the pipe is really negligible, meaning that the temperature I’m sensing is the temperature of the air pocket between the pipe and the insulation. That air pocket is being heated/cooled by air-to-pipe conduction only. In practice, this means the temperature I’m reading back is not the same as the pipe’s surface temperature, and therefore does not reflect what a user would feel. Not good!
I did a quick test of immersing one of the thermistors in the water of the cold loop. In that case, the reading basically agreed with the one taken from the radiator surface using my non-contact thermometer. Interestingly, this means that the pipe surface temperature is basically equal to the water temperature, and I should be able to measure that temp by just putting the sensor in the water. I’m going to figure out a way to permanently install the sensors through the walls of the reservoirs.